Вход / Регистрация
02.08.2026, 14:46
Выбор фона:



17.03.2016
Биороботам вырастили живые, управляемые светом мышцы
Американские
ученые создали микроскопических биороботов, которые движутся за счет
сокращений модифицированных мускульных клеток, реагирующих на свет.
Авторы сообщают о разработке в журнале Proceedings of the National
Academy of Sciences (PNAS); кратко о ней рассказывает пресс-релиз
Иллинойсского университета в Урбане-Шампейне.
Биоробот приводится в движение мышечными клетками (миобластами) мышей, в геном которых внесен ген белка ChR2(H134R). Это светочувствительная форма ионного канала, которая срабатывает при облучении синим светом длиной волны около 470 нм и заставляет мышечную клетку сокращаться. Культуры таких клеток выращивались так, чтобы образовывать миниатюрные волокна кольцевой формы. Такие упругие мышечные жгуты можно использовать для биороботов разной конструкции – а соединяя вместе для параллельной работы давать их движению больше мощности.
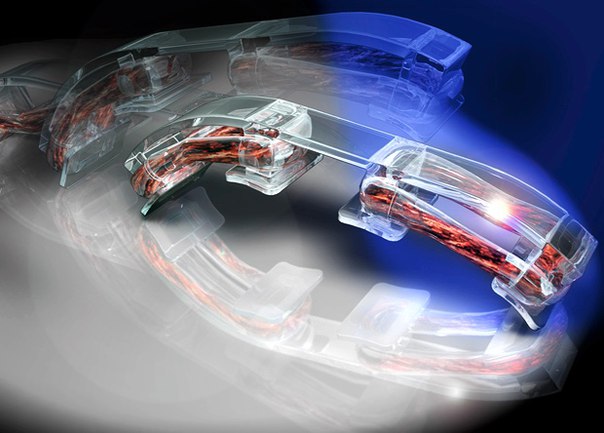
Чтобы продемонстрировать их в работе, ученые распечатали на 3D-принтере «скелет» из полиэтиленгликольакрилата (PEGDA) в форме гибкой дуги, опирающейся на пару стобиков, на которые было натянуто упругое кольцо из мышечных клеток. После дополнительной стадии культивирования биороботы были успешно испытаны: при облучении светом нужной длины волны они клетки сокращались, деформируя «скелет» и перемещая устройство. Как и обычные мышечные клетки, двигатель такого робота можно натренировать, заставляя его сокращаться снова и снова.
Понимание механизмов, лежащих в основе работы биологических систем, позволяет использовать их в «гибридных» биороботах, которые комбинируют биологические и электронные компоненты. В качестве двигателей для таких миниатюрных устройств ученые пытаются использовать различные живые системы, от жгутиконосных бактерий до клеток сердечной мышцы. Два года назад команда профессора Рашида Башира (Rashid Bashir) уже демонстрировала гибкого биоробота, движимого клетками скелетных мышц, которые стимулировались внешним электромагнитным полем.
Однако такой метод управления не позволяет выборочно активировать нужные клетки, точно управляя движением. Кроме того, электричество способно нарушать нормальную работу живых клеток, среди которых, возможно, найдут применение эти биороботы. Поэтому ученые решили усовершенствовать свое устройство, дополнив его «световым» управлением. «Свет – неинвазивный способ контролировать такие машины, – добавляет Рашид Башир. – Он дает гибкость в конструировании и в движении».
Биоробот приводится в движение мышечными клетками (миобластами) мышей, в геном которых внесен ген белка ChR2(H134R). Это светочувствительная форма ионного канала, которая срабатывает при облучении синим светом длиной волны около 470 нм и заставляет мышечную клетку сокращаться. Культуры таких клеток выращивались так, чтобы образовывать миниатюрные волокна кольцевой формы. Такие упругие мышечные жгуты можно использовать для биороботов разной конструкции – а соединяя вместе для параллельной работы давать их движению больше мощности.
Чтобы продемонстрировать их в работе, ученые распечатали на 3D-принтере «скелет» из полиэтиленгликольакрилата (PEGDA) в форме гибкой дуги, опирающейся на пару стобиков, на которые было натянуто упругое кольцо из мышечных клеток. После дополнительной стадии культивирования биороботы были успешно испытаны: при облучении светом нужной длины волны они клетки сокращались, деформируя «скелет» и перемещая устройство. Как и обычные мышечные клетки, двигатель такого робота можно натренировать, заставляя его сокращаться снова и снова.
Понимание механизмов, лежащих в основе работы биологических систем, позволяет использовать их в «гибридных» биороботах, которые комбинируют биологические и электронные компоненты. В качестве двигателей для таких миниатюрных устройств ученые пытаются использовать различные живые системы, от жгутиконосных бактерий до клеток сердечной мышцы. Два года назад команда профессора Рашида Башира (Rashid Bashir) уже демонстрировала гибкого биоробота, движимого клетками скелетных мышц, которые стимулировались внешним электромагнитным полем.
Однако такой метод управления не позволяет выборочно активировать нужные клетки, точно управляя движением. Кроме того, электричество способно нарушать нормальную работу живых клеток, среди которых, возможно, найдут применение эти биороботы. Поэтому ученые решили усовершенствовать свое устройство, дополнив его «световым» управлением. «Свет – неинвазивный способ контролировать такие машины, – добавляет Рашид Башир. – Он дает гибкость в конструировании и в движении».
Комментарии 0
ТОП Новостей
| Жак Валле посвятил расследованию НЛО 70 лет. Его последний дневник утверждает: загадка куда глубже, чем просто "инопланетяне! (2) |
| Римский легионер из света: загадочная беременность бразильской учительницы (1) |
| Ученые из Калифорнийского технологического института нашли доказательства “Что-то катастрофическое” Случилось с Нептуном В 1989 году (0) |
| Круглый ковчег: глиняная табличка переписывает историю всемирного потопа (0) |
| НЛО: Они здесь не потому, что прилетают, а потому что никогда не улетали — новая гипотеза физика (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Онлайн всего: 94
Пользователей: 94
Новых: 0
Мы в соцсетях
