Вход / Регистрация
03.08.2026, 12:06
Выбор фона:



/ Новости сайта / Наука и Технологии / Чувство осязания роботов может быть усилено за счет предоставления им отпечатков пальцев, подобных человеческим.
27.09.2011

Чувство осязания роботов может быть усилено за счет предоставления им отпечатков пальцев, подобных человеческим.
27.09.11 Чувство осязания роботов может быть усилено за счет предоставления им отпечатков пальцев, подобных человеческим.
Отпечатки пальцев выполняют не только функцию уникального идентификатора личности. Они помогают нам лучше удерживать мелкие предметы и более точно определить их форму на ощупь, используя чувство осязания. Когда выступающие части отпечатков пальцев касаются чего-либо, это вносит изменения в колебания, передающиеся сквозь слой кожи, таким образом, нервные окончания получают гораздо больше информации об объекте прикосновения. Исследователи из Национального университета Сингапура пытаются увеличить осязательные способности роботов, снабдив концы их пальцев датчиками, подражающими рельефу отпечатков пальцев человека. Используя принципы, реализованные в человеческом организме, и передавая центральному процессору уже предварительно обработанные сигналы, можно дать возможность роботам точно идентифицировать объекты через их форму, не увеличивая значительно нагрузку на их процессоры.
Для роботов, у которых обработка всех сигналов выполняется в большинстве случаев одним единственным центральным процессором, такая предварительная обработка является несомненным преимуществом. Это позволит высвободить дефицитную вычислительную мощность для других вычислений и для решения задач более высокого уровня.
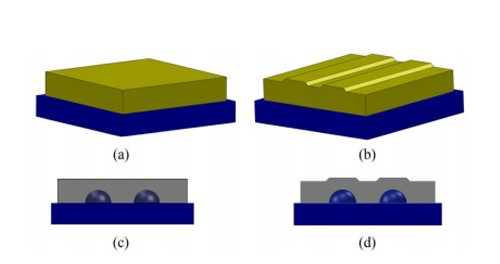
Опытный датчик прикосновения, разработанный сингапурскими исследователями, представляет собой четырехмиллиметровую квадратную пластину, на поверхности которой расположены чувствительные датчики давления. Используя для покрытия этих датчиков пластиковый лист с плоской поверхностью, исследователи сделали записи множества измерений при прикосновении этого датчика к различным предметам. Затем, покрыв пластину датчика пластиковым листом, имеющим перфорированную поверхность с острыми гранями, исследователи повторили процесс записи измерений. Во второй раз сигнал, полученный от датчика, во много раз был более богат информацией, что в большинстве случаев позволило правильно идентифицировать форму объектов прикосновения.
Можно сказать, что за счет использования сложной формы поверхности датчика выполняется предварительная обработка информации, что позволяет сэкономить вычислительную мощность центрального процессора робота. И эта технология может стать хорошим решением для реализации систем автоматического распознавания формы объектов, имеющих сложные поверхности и формы.
Источник: dailytechinfo.org
Отпечатки пальцев выполняют не только функцию уникального идентификатора личности. Они помогают нам лучше удерживать мелкие предметы и более точно определить их форму на ощупь, используя чувство осязания. Когда выступающие части отпечатков пальцев касаются чего-либо, это вносит изменения в колебания, передающиеся сквозь слой кожи, таким образом, нервные окончания получают гораздо больше информации об объекте прикосновения. Исследователи из Национального университета Сингапура пытаются увеличить осязательные способности роботов, снабдив концы их пальцев датчиками, подражающими рельефу отпечатков пальцев человека. Используя принципы, реализованные в человеческом организме, и передавая центральному процессору уже предварительно обработанные сигналы, можно дать возможность роботам точно идентифицировать объекты через их форму, не увеличивая значительно нагрузку на их процессоры.
Для роботов, у которых обработка всех сигналов выполняется в большинстве случаев одним единственным центральным процессором, такая предварительная обработка является несомненным преимуществом. Это позволит высвободить дефицитную вычислительную мощность для других вычислений и для решения задач более высокого уровня.
Опытный датчик прикосновения, разработанный сингапурскими исследователями, представляет собой четырехмиллиметровую квадратную пластину, на поверхности которой расположены чувствительные датчики давления. Используя для покрытия этих датчиков пластиковый лист с плоской поверхностью, исследователи сделали записи множества измерений при прикосновении этого датчика к различным предметам. Затем, покрыв пластину датчика пластиковым листом, имеющим перфорированную поверхность с острыми гранями, исследователи повторили процесс записи измерений. Во второй раз сигнал, полученный от датчика, во много раз был более богат информацией, что в большинстве случаев позволило правильно идентифицировать форму объектов прикосновения.
Можно сказать, что за счет использования сложной формы поверхности датчика выполняется предварительная обработка информации, что позволяет сэкономить вычислительную мощность центрального процессора робота. И эта технология может стать хорошим решением для реализации систем автоматического распознавания формы объектов, имеющих сложные поверхности и формы.
Источник: dailytechinfo.org
Комментарии 0
ТОП Новостей
| Тоннели сквозь пространство-время: доклад Пентагона о червоточинах и звёздных вратах (0) |
| Сколько цивилизаций существовало на Земле? Древние тексты против официальной истории (0) |
| Гороскоп на 3 августа 2026 года для всех знаков зодиака (0) |
| ДНК из древних курганов: предки кыргызов связаны с загадочными киммерийцами (0) |
| Апофис: гравитационное влияние которого ничтожно, а риск столкновения существует (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Онлайн всего: 112
Пользователей: 112
Новых: 0
Мы в соцсетях
