Вход / Регистрация
16.07.2026, 10:43
Выбор фона:



06.06.2019
Роборука поможет миссии InSight возобновить бурение
Роботизированная рука автоматической марсианской станции InSight сможет помочь буровой установке HP3 возобновить работу, немного приподняв ее, тем самым скомпенсировав отдачу при ударах. К такому выводу пришли инженеры миссии, назвавшие недостаточное сцепление между буром и окружающим его грунтом основной версией приостановки работ по бурению, сообщается на сайте Германского центра авиации и космонавтики.
Старт автоматической исследовательской миссии InSight состоялся в мае 2018 года. Основная задача миссии — исследование внутреннего строения Марса и геологических процессов, идущих в его недрах. Станция совершила посадку в ноябре 2018 года в районе нагорья Элизиум, а в середине декабря 2018 года и в феврале 2019 года установила на поверхности Марса два основных научных инструмента миссии: бур HP3, предназначенный для измерения тепловых потоков в марсианском грунте, и сейсмограф SEIS, который недавно зарегистрировал свое первое «марсотрясение». В начале февраля 2019 года начала полноценную работу система датчиков APSS, собирающая данные о погодных условиях.
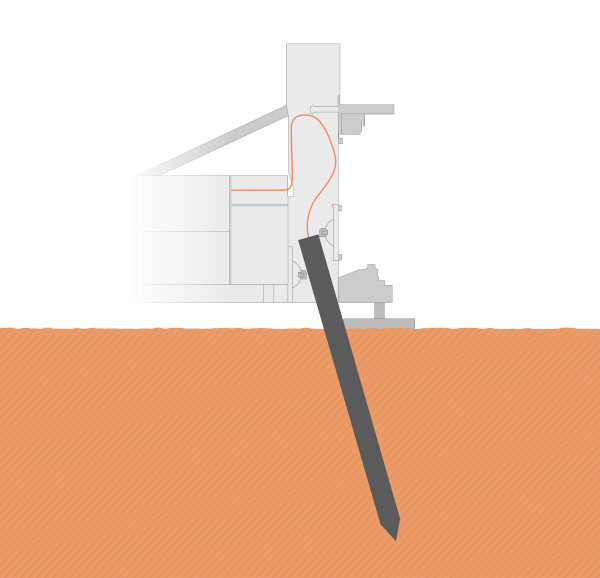
В начале марта этого года инструмент HP3 приостановил буровые работы, углубившись в грунт на 30 сантиметров. Предполагается, что бур столкнулся с камнем, что подтверждается данными, полученными сейсмографом в ходе серии диагностических ударов. Задняя часть установки зацепилась за опорную конструкцию и немного накренилась, из-за чего бур оказался в ловушке. Вторая версия произошедшего заключается в том, что существует недостаточное сцепление между буром и окружающим его грунтом: такое возможно, если скважина заполнена обломочным материалом или реголитом, и отдача при ударах не уравновешивается. Эта версия подтверждается техническими данными, полученными HP3 и сейчас принята как основная.
Сейчас инженеры миссии готовятся провести операцию по поднятию опорной конструкции буровой установки при помощи механизма захвата, установленного на 2,4-метровой роботизированной руке IDA (Instrument Deployment Arm). Это должно помочь либо скомпенсировать отдачу при бурении, либо полностью высвободить бур из ловушки. Ожидается, что процесс подъема будет проходить в несколько этапов, начиная с конца июня. Вначале рука подцепит опорную конструкцию, затем в течение недели она аккуратно будет поднимать установку в три этапа, постоянно контролируя процесс при помощи камер. Если что-то пойдет не так, рука сможет вытащить бур из грунта, но он станет непригоден для работы, так как манипулятор неспособен вставить его обратно в скважину, а буровая установка спроектирована так, что не предусматривает выдергивания грубой силой и будет повреждена при таком способе извлечения.
Старт автоматической исследовательской миссии InSight состоялся в мае 2018 года. Основная задача миссии — исследование внутреннего строения Марса и геологических процессов, идущих в его недрах. Станция совершила посадку в ноябре 2018 года в районе нагорья Элизиум, а в середине декабря 2018 года и в феврале 2019 года установила на поверхности Марса два основных научных инструмента миссии: бур HP3, предназначенный для измерения тепловых потоков в марсианском грунте, и сейсмограф SEIS, который недавно зарегистрировал свое первое «марсотрясение». В начале февраля 2019 года начала полноценную работу система датчиков APSS, собирающая данные о погодных условиях.
В начале марта этого года инструмент HP3 приостановил буровые работы, углубившись в грунт на 30 сантиметров. Предполагается, что бур столкнулся с камнем, что подтверждается данными, полученными сейсмографом в ходе серии диагностических ударов. Задняя часть установки зацепилась за опорную конструкцию и немного накренилась, из-за чего бур оказался в ловушке. Вторая версия произошедшего заключается в том, что существует недостаточное сцепление между буром и окружающим его грунтом: такое возможно, если скважина заполнена обломочным материалом или реголитом, и отдача при ударах не уравновешивается. Эта версия подтверждается техническими данными, полученными HP3 и сейчас принята как основная.
Сейчас инженеры миссии готовятся провести операцию по поднятию опорной конструкции буровой установки при помощи механизма захвата, установленного на 2,4-метровой роботизированной руке IDA (Instrument Deployment Arm). Это должно помочь либо скомпенсировать отдачу при бурении, либо полностью высвободить бур из ловушки. Ожидается, что процесс подъема будет проходить в несколько этапов, начиная с конца июня. Вначале рука подцепит опорную конструкцию, затем в течение недели она аккуратно будет поднимать установку в три этапа, постоянно контролируя процесс при помощи камер. Если что-то пойдет не так, рука сможет вытащить бур из грунта, но он станет непригоден для работы, так как манипулятор неспособен вставить его обратно в скважину, а буровая установка спроектирована так, что не предусматривает выдергивания грубой силой и будет повреждена при таком способе извлечения.
Источник: https://nplus1.ru
Комментарии 0
ТОП Новостей
| Земля готовится к перевороту: новая теория предсказывает сдвиг коры на 104 градуса (0) |
| Бывший пилот ЦРУ Джон Лир: Земля — космическая тюрьма, а Луну притащили из другой части галактики (0) |
| Солнечная буря столетия: учёные предупредили о катастрофе, которая может оставить планету без электричества на месяцы (0) |
| Гороскоп на 16 июля 2026 года для всех знаков зодиака (0) |
| Неандертальцы из Западной Европы не вымерли из-за близкородственных браков: их ДНК оказалась удивительно здоровой (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Мы в соцсетях
