Вход / Регистрация
15.07.2026, 07:00
Выбор фона:



16.11.2011

В распоряжение робота предоставили человеческую руку.
16.11.11 Французские инженеры создали простую систему управления нашей конечностью с помощью робота.
Мы уже привыкли к тому, что человек способен контролировать механическую руку, которая служит ему протезом. Исследователи из Лаборатории информатики, робототехники и микроэлектроники в Монпелье (LIRMM) предлагают обратную технологию.
Для проведения экспериментов они установили на правую руку каждого из пяти добровольцев по четыре электрода — два на предплечье, один на сгибе локтя и один в районе бицепса. Отправляя на них слабые электрические сигналы, робот мог контролировать движения запястного и локтевого суставов человека.
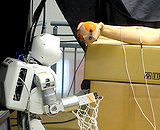
Рука подопытного, представляющая собой с точки зрения механики систему с одной степенью свободы, лежала на ровной поверхности и сжимала мяч. Андроид Fujitsu HOAP-3 должен был заставить мяч упасть точно в корзину, для чего командовал как живой конечностью, так и своей собственной, имеющей четыре степени свободы.
Как нетрудно догадаться, разработка призвана помочь людям с ограниченными возможностями управления своими руками и ногами. Руководитель проекта Бруно Вильена Адорно считает, что лучше помогать инвалиду действовать собственными конечностями, нежели создавать для этого сложные и дорогостоящие искусственные приспособления. К тому же передача сигналов нервам осуществляется здесь методом функциональной электрической стимуляции, который используется при лечении травм опорно-двигательного аппарата и восстановительной терапии.
Технология была представлена на конференции по интеллектуальным роботам и системам IROS 2011, проведённой 25–30 сентября в Сан-Франциско (США).
Мы уже привыкли к тому, что человек способен контролировать механическую руку, которая служит ему протезом. Исследователи из Лаборатории информатики, робототехники и микроэлектроники в Монпелье (LIRMM) предлагают обратную технологию.
Для проведения экспериментов они установили на правую руку каждого из пяти добровольцев по четыре электрода — два на предплечье, один на сгибе локтя и один в районе бицепса. Отправляя на них слабые электрические сигналы, робот мог контролировать движения запястного и локтевого суставов человека.
Рука подопытного, представляющая собой с точки зрения механики систему с одной степенью свободы, лежала на ровной поверхности и сжимала мяч. Андроид Fujitsu HOAP-3 должен был заставить мяч упасть точно в корзину, для чего командовал как живой конечностью, так и своей собственной, имеющей четыре степени свободы.
Как нетрудно догадаться, разработка призвана помочь людям с ограниченными возможностями управления своими руками и ногами. Руководитель проекта Бруно Вильена Адорно считает, что лучше помогать инвалиду действовать собственными конечностями, нежели создавать для этого сложные и дорогостоящие искусственные приспособления. К тому же передача сигналов нервам осуществляется здесь методом функциональной электрической стимуляции, который используется при лечении травм опорно-двигательного аппарата и восстановительной терапии.
Технология была представлена на конференции по интеллектуальным роботам и системам IROS 2011, проведённой 25–30 сентября в Сан-Франциско (США).
Комментарии 0

Архив записей
Статистика
Онлайн всего: 85
Пользователей: 85
Новых: 0
Мы в соцсетях
