Вход / Регистрация
03.08.2026, 17:23
Выбор фона:



19.07.2017

Робот Федор первым в мире научился садиться на шпагат
Российский человекоподобный робот Федор, созданный в рамках проекта Фонда перспективных исследований (ФПИ) для спасательных операций и работы в космосе, стал первым в мире роботом, способным сесть на шпагат, сообщили в фонде.
Федор (FEDOR — Final Experimental Demonstration Object Research) — первый отечественный человекообразный робот, созданный в рамках проекта ФПИ. Робот предназначен для того, чтобы заменить человека в местах повышенного риска — например, в спасательных операциях, в космосе. Планируется, что робот Федор в 2021 году отправится в космос на новом российском космическом корабле "Федерация".
"Робот Федор обладает лучшей в мире кинематикой среди роботов-андроидов: он является единственным в мире антропоморфным роботом, способным сесть и на продольный, и на поперечный шпагаты. Механика других существующих в мире андроидов не обеспечивает такой свободы действия", — отметили в фонде.
Как пояснили в ФПИ, гибкость конструкции робота-спасателя необходима для того, чтобы дать ему возможность преодолевать разнообразные препятствия, например, завалы.
"Кроме того, Федор — единственный в мире андроид, способный смотреть как вертикально вверх, так и строго вниз, опустив голову за счет ее подвижности. Это не причуда разработчиков: высокая подвижность головного модуля позволяет ему смотреть вперед даже тогда, когда робот передвигается "по-пластунски", — рассказали в ФПИ.
Взаимодействие с оператором
Еще одно уникальное качество робота Фёдора — система обратной силомоментной или сенсорной связи. Она позволяет создать эффект погружения оператора в те физические обстоятельства, в которых находится робот. Когда речь идет о таком сложном устройстве, как антропоморфный робот с несколькими режимами управления, сенсорная система должна регулировать сложные механические движения, связанные, например, с равновесием и динамикой.
"Управляющий костюм обеспечивает связь оператора с роботом: в прямом направлении человек управляет приводами робота, в обратном — получает информацию о внешних нагрузках на робота. При этом приводы управляющего костюма вступают во взаимодействие с мышцами человека, так что оператор может чувствовать и управлять той силой, которую робот прилагает к выполняемым действиям", — отметили в ФПИ.
Так, от сенсоров робота, которые измеряют скорость, угловое и линейное положение и многие другие данные, информация поступает на управляющий компьютер. Если робот упирается рукой в стену и не может продвинуться далее, то человек через приводы управляющего костюма получает сопротивление, эквивалентное усилию своей руки.
"Если добавить сюда данные, получаемые от "органов зрения" и "органов слуха" робота, то эффект присутствия оператора в месте действия робота будет практически полным. Зарубежных технологий такого уровня проработки на сегодняшний день не существует", — подчеркнули в ФПИ.
Видимая часть айсберга
Робот Федор, который умеет самостоятельно перемещаться в городе и по пересеченной местности, работать с инструментами и управлять транспортными средствами, представляет собой антропоморфную робототехническую платформу, управление которой может производиться как в автономном режиме, так и в комбинированном, когда часть функций выполняется роботом автоматически, а часть задается оператором, причем не только с классического пульта управления, но и посредством естественных движений и жестов.
"Сам робот Федор — это только видимая часть айсберга. Сложность разработки антропоморфных роботов сегодня обусловлена высокими требованиями к техническим решениям как в области механики, так и в области алгоритмов управления", — рассказал руководитель проекта ФПИ Сергей Хурс.
Так, помимо робототехнической платформы в состав комплекса входит комбинированная система дистанционного управления с так называемым "управляющим костюмом". В основе этой системы лежит математическая модель комбинированного управления, ее особенностью является согласование физических и математических моделей тела человека, "управляющего костюма" и конструкции робота.
"Если отдельные разработки подобного рода и существовали до этого, замкнутой математической модели для антропоморфного робота ранее не было", — подчеркивают в фонде.
В рамках математической модели первое согласование обеспечивает пересчёт показаний сенсоров "управляющего костюма" на модель тела человека, так как его суставы и шарниры механизмов робота не совпадают. Второе согласование устраняет различие конструкций "управляющего костюма" и робота.
"Развитая сенсорная система робота включает силомоментные датчики, информацию от которых необходимо передать на тело оператора в виде внешних нагрузок, давая ему представление о силовом взаимодействии робота с окружающими предметами. В итоге появляется модель с прямыми и обратными сенсорными связями, которая позволяет оператору управлять роботом на основе собственных ощущений", — рассказали в ФПИ.
Робот-автолюбитель
Робота Федора отличает высокий уровень проработки автономных программ, связанных с управлением транспортным средством. Сегодня робот способен самостоятельно сесть в автомобиль, снять транспортное средство со стояночного тормоза и управлять им через ручную коробку передач, рулевое колесо, педали газа, сцепления и тормоза, а также поворачивать рулевое колесо с перехватом. Все эти действия андроид выполняет автономно, без участия оператора.
При этом видеоканалы стереоскопической системы технического зрения Фёдора могут работать как совместно, так и раздельно. Совместная работа каналов позволяет определять расстояние до объектов, а раздельная — решать не менее двух функциональных задач одновременно. К примеру, это позволяет роботу выполнять действия двумя разными инструментами одновременно: робот получает данные от правого и левого видеоканалов, анализирует информацию о нескольких объектах и об их движении, сопоставляет дальность и производит другие вычислительные операции.
"Механика робота позволяет воспроизвести практически любые движения человеческого тела, а программное обеспечение, включая пополняемые библиотеки, позволяет расширять профессиональные навыки робота. При этом самой трудоемкой задачей является обучение только первого робота: остальные экземпляры будут получать "знания" методом копирования", — заключили в ФПИ.
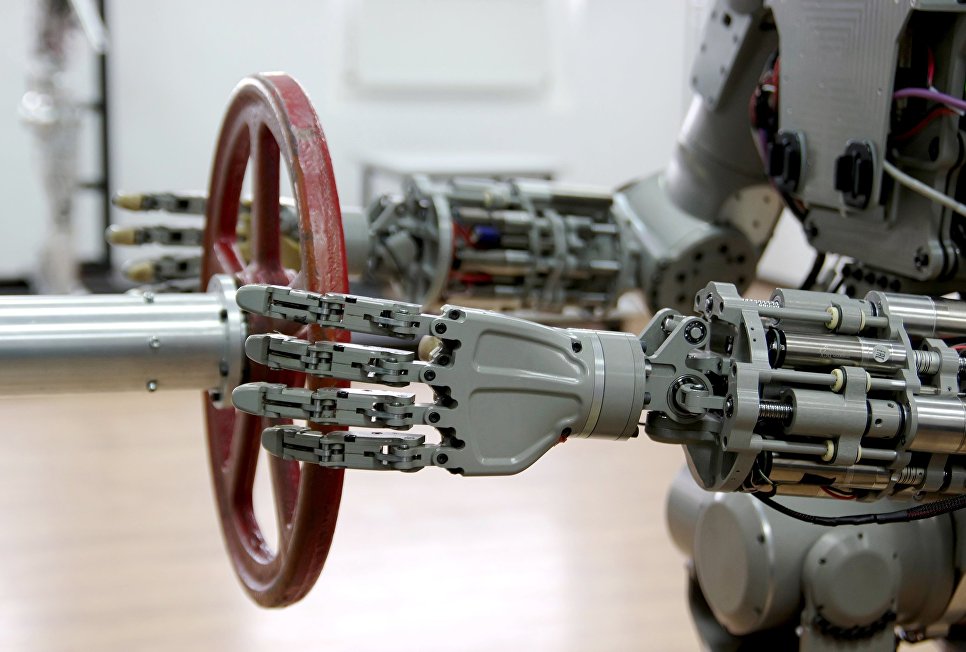
Испытание антропоморфного робота "Федор" проекта "Спасатель" в лаборатории на базе НПО "Андроидная техника" в Магнитогорске
Источник: https://ria.ru
Комментарии 0
ТОП Новостей
| Сколько цивилизаций существовало на Земле? Древние тексты против официальной истории (0) |
| Тоннели сквозь пространство-время: доклад Пентагона о червоточинах и звёздных вратах (0) |
| ДНК из древних курганов: предки кыргызов связаны с загадочными киммерийцами (0) |
| Гороскоп на 3 августа 2026 года для всех знаков зодиака (0) |
| Кольца Венеры: обнаружение, которое ждало своего часа десять лет (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Онлайн всего: 102
Пользователей: 102
Новых: 0
Мы в соцсетях
