Вход / Регистрация
02.08.2026, 10:48
Выбор фона:



/ Новости сайта / Наука и Технологии / Робот-змея способен ходить на двух "ногах" с помощью головы и хвоста
06.10.2014

Робот-змея способен ходить на двух "ногах" с помощью головы и хвоста
Одно из самых перспективных научных направлений в современной робототехнике основывается на науке бионике. То есть на создание роботов инженеров вдохновляет биология каких бы то ни было животных.
При таком подходе эволюция предлагает пути развития для техники: у животных было много времени, чтобы приспособиться к окружающей действительности и эволюционировать необходимым образом, так что учёные прямо или косвенно пользуются достижениями природы. Такие роботы получаются гибкими, надёжными и высокопроизводительными.
При этом, что немаловажно, животные не являются абсолютной вершиной, к которой стоит стремиться создателям роботов. Часто искусственно созданные машины вынуждены работать в сложных или опасных условиях, не предусмотренных эволюцией.
На создание уже нескольких роботов учёных со всего мира вдохновляла змея. Это животное удивляет своими возможностями, хотя весьма непросто создать нечто, способное повторить все эти вещи, по крайней мере, в теории или при моделировании. Например, змея движется особым образом и может огибать препятствия, поднимая голову и становясь на хвост.
В ходе международной конференции по интеллектуальным роботам и системам IROS, прошедшей в Чикаго в сентябре 2014 года, группа индийских учёных представила прототип робота-змеи, способный повторить эту уникальную форму передвижения.
Реконфигурируемый двуногий робот-змея ReBiS может использовать голову и хвост как ноги. В сложной среде он попросту встаёт на них и начинает "топать" в заданном направлении.
Исследователи планируют совершенствовать и оптимизировать конструкцию дальше: например, попробовать изготовить роботов с несколькими модулями и манерами ходьбы, чтобы увидеть, какая конфигурация окажется наиболее эффективной для передвижения по пересечённой и неровной местности.
При таком подходе эволюция предлагает пути развития для техники: у животных было много времени, чтобы приспособиться к окружающей действительности и эволюционировать необходимым образом, так что учёные прямо или косвенно пользуются достижениями природы. Такие роботы получаются гибкими, надёжными и высокопроизводительными.
При этом, что немаловажно, животные не являются абсолютной вершиной, к которой стоит стремиться создателям роботов. Часто искусственно созданные машины вынуждены работать в сложных или опасных условиях, не предусмотренных эволюцией.
На создание уже нескольких роботов учёных со всего мира вдохновляла змея. Это животное удивляет своими возможностями, хотя весьма непросто создать нечто, способное повторить все эти вещи, по крайней мере, в теории или при моделировании. Например, змея движется особым образом и может огибать препятствия, поднимая голову и становясь на хвост.
В ходе международной конференции по интеллектуальным роботам и системам IROS, прошедшей в Чикаго в сентябре 2014 года, группа индийских учёных представила прототип робота-змеи, способный повторить эту уникальную форму передвижения.
Реконфигурируемый двуногий робот-змея ReBiS может использовать голову и хвост как ноги. В сложной среде он попросту встаёт на них и начинает "топать" в заданном направлении.
Исследователи планируют совершенствовать и оптимизировать конструкцию дальше: например, попробовать изготовить роботов с несколькими модулями и манерами ходьбы, чтобы увидеть, какая конфигурация окажется наиболее эффективной для передвижения по пересечённой и неровной местности.
Робот-змея состоит из нескольких сегментов-модулей. В теории, такие роботы должны научиться перенастраивать себя и менять способ передвижения в зависимости от условий, однако создание такой универсальной машины — весьма сложная процедура.
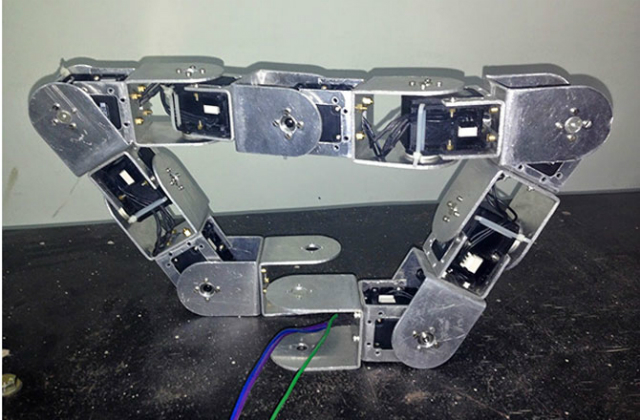
ReBiS пока далёк от идеала: он несколько менее универсален, зато гораздо проще и дешевле. Пока он способен ходить на двух "ногах" с помощью головы и хвоста, перекатываться и ползти. Его суставы-модули при этом могут выворачиваться в любом направлении.
ReBiS пока далёк от идеала: он несколько менее универсален, зато гораздо проще и дешевле. Пока он способен ходить на двух "ногах" с помощью головы и хвоста, перекатываться и ползти. Его суставы-модули при этом могут выворачиваться в любом направлении.
Комментарии 1

ТОП Новостей
| Жак Валле посвятил расследованию НЛО 70 лет. Его последний дневник утверждает: загадка куда глубже, чем просто "инопланетяне! (1) |
| Тень войны на красной пустыне: что скрывает снимок с Марса (0) |
| Возраст наскальных рисунков Фон-де-Гом: тайна, скрытая в черном пигменте (0) |
| Гороскоп на 2 августа 2026 года для всех знаков зодиака (0) |
| Фермерский эффект: ученые нашли бактерии, защищающие детей от аллергии и астмы (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Мы в соцсетях
