Вход / Регистрация
04.08.2026, 05:24
Выбор фона:



18.10.2018

Роботов научат самостоятельно воспринимать пространство
Французские исследователи уверены, что независимые роботизированные системы должны научиться воспринимать пространство, не основываясь на человеческом понимании. Для этого они разработали новый подход.
Исследователи из Сорбонны и Национального центра научных исследований (НЦНИ) Франции изучили предпосылки упрощенных пространственных понятий в роботизированных системах на основе сенсомоторного потока робота. Их работа, опубликованная в базе препринтов arXiv.org, — часть более крупного проекта, в котором ученые рассматривают, как фундаментальные понятия восприятия (тело, пространство, объект, цвет и так далее) могут быть привиты биологическим или искусственным системам.
До этого момента разработки роботизированных систем в основном отображали то, как человек воспринимает мир. Однако из-за этого роботы, ведомые исключительно человеческой интуицией, могут быть ограничены в восприятии тем, что испытывают люди.
Чтобы создать полностью автономных роботов, исследователям, возможно, придется отступить от привычных методов и позволить роботизированным агентам развить собственное восприятие мира. По словам команды исследователей из Сорбонны и НЦНИ, робот должен постепенно развить восприятие при помощи анализа сенсомоторного опыта и определения принципов, имеющих смысл.
Исследователи из Сорбонны и Национального центра научных исследований (НЦНИ) Франции изучили предпосылки упрощенных пространственных понятий в роботизированных системах на основе сенсомоторного потока робота. Их работа, опубликованная в базе препринтов arXiv.org, — часть более крупного проекта, в котором ученые рассматривают, как фундаментальные понятия восприятия (тело, пространство, объект, цвет и так далее) могут быть привиты биологическим или искусственным системам.
До этого момента разработки роботизированных систем в основном отображали то, как человек воспринимает мир. Однако из-за этого роботы, ведомые исключительно человеческой интуицией, могут быть ограничены в восприятии тем, что испытывают люди.
Чтобы создать полностью автономных роботов, исследователям, возможно, придется отступить от привычных методов и позволить роботизированным агентам развить собственное восприятие мира. По словам команды исследователей из Сорбонны и НЦНИ, робот должен постепенно развить восприятие при помощи анализа сенсомоторного опыта и определения принципов, имеющих смысл.
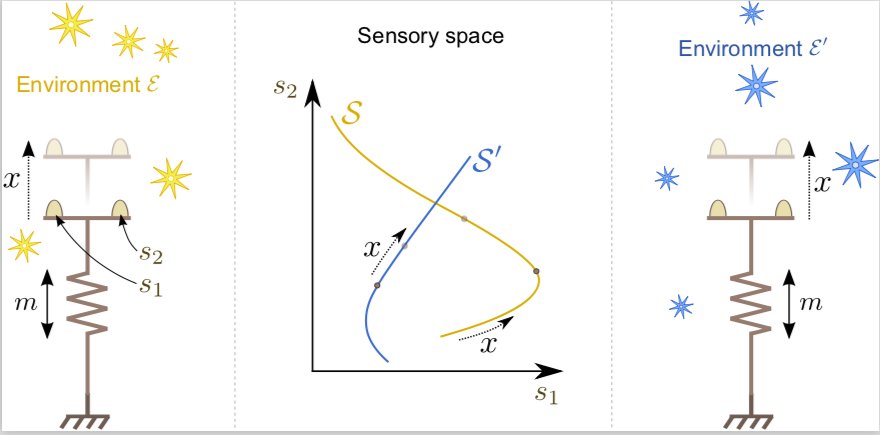
Агент может двигать своими датчиками во внешнем пространстве при помощи мотора. Несмотря на то что конфигурация внешнего агента X может быть идентичной, его сенсорный опыт значительно изменяется в зависимости от структуры окружающей среды / © Laflaquière et al.
Александр Терехов, работавший над проектом, и его коллеги показали, что понятие пространства как независимого от среды явления нельзя вывести только при помощи экстероцептивной информации, так как она сильно варьируется в зависимости от происходящего в окружающей среде. Это понятие может быть четче определено при изучении функций, связывающих моторные команды с изменениями внешних — по отношению к агенту — раздражителей.
«Важная информация получена из старого исследования известного французского математика Анри Пуанкаре, заинтересованного в том, как математика в общем и геометрия в частности могут возникать в человеческом восприятии, — говорит Терехов. — Он предположил, что синхронность сенсорного ввода может играть решающую роль».
Идею Пуанкаре проще объяснить на простом примере. Когда мы смотрим на какой-то объект, глаз захватывает конкретное изображение, которое изменится, если объект переместится на 10 сантиметров влево. Однако, если мы подвинемся на 10 сантиметров влево, то изображение, которое мы видим, останется практически тем же.
Чтобы применить эти идеи к разработке роботизированных систем, ученые запрограммировали виртуальную роботизированную руку с камерой на конце. Робот понимал измерения, получаемые от суставов руки, каждый раз, когда получал изображение.
«Объединяя все эти измерения, робот строит абстракцию, математически эквивалентную позиции и ориентации его камеры, даже если у него нет прямого доступа к этой информации, — объясняет Терехов. — Самое главное: пусть это абстрактное понятие и получено на основе изображения, в итоге оно становится независимым от него, а значит, работает для всех окружающих сред. Так и наше понятие пространства не зависит от конкретной сцены, которую мы видим».
Комментарии 0

Архив записей
Статистика
Онлайн всего: 83
Пользователей: 83
Новых: 0
Мы в соцсетях
