Вход / Регистрация
31.07.2026, 18:47
Выбор фона:



29.01.2013
НАСА создаёт робота для добычи воды на Луне
Кажется, к снабжению лунной базы в США готовятся основательно: роботы,
поддерживающие её функционирование, в последнее время анонсируются один
за другим.

Функционировать RASSOR Excavator должен не сам по себе, а в паре с автономным роботизированным комплексом — оборудованием, перерабатывающим лунный грунт. Для взаимодействия с ним робот умеет трансформироваться в Z-образную форму, при которой его верхняя площадка, предназначенная для перевозки грунта, поднимается на 75 см над поверхностью земли (то есть Луны). Оттуда добытый реголит — по 18 кг за раз — сможет подобрать перерабатывающий агрегат. Несмотря на мнение ряда учёных о том, что смёрзшийся лунный грунт будет сложен для обработки и извлечения из него воды, в НАСА уверены, что в приполярных кратерах лёд существует в чистой форме и лишь слегка присыпан реголитом. Его нужно только раскопать и перевезти — собственно, для этого и создан телеуправляемый робот-копатель с широкими возможностями для автономных действий.
Особенно подчеркивается, что по проходимости небольшой робот весом всего в полцентнера близок к танку, за счёт барабанных катков (с развитыми грунтозацепами) на носу и корме. Благодаря повышенному сцеплению он сможет двигаться впятеро быстрее Curiosity, максимальная скорость которого не превышает 4 сантиметров в секунду.

Другой сильной стороной нового шасси называется его надёжность. К такой конструкции пришлось обратиться потому, что на испытаниях в пустынных условиях Калифорнии чисто гусеничные шасси показали слабость, неприметную на Земле: гусеничные звенья и элементы подвески засыпались пылью, блокировавшей со временем их дальнейшее вращение. На земных танках всё прекрасно чистится при помощи лома и танкового экипажа, да и столь тонкая пыль, как на Луне, у нас отчего-то не в ходу. Кроме того, грязь может быть смыта исключительно доступной водой, с которой на спутнике пока проблемы...
По расчётам, чтобы заправить одну ракету топливом, получаемым гидролизом из лунной воды (кислород и водород), одному RASSOR Excavator'у потребуется работать пять лет по 16 часов в сутки. Очевидно, что люди вряд смогут ходить за ним всё это время и счищать пыль с катков. Поэтому после испытаний от гусениц отказались, ну а колёса трудно рассматривать как опцию для мини-экскаватора при низкой гравитации.
Будем надеяться, что после доводки прототипа RASSOR Excavator 2, намеченного на 2014 год, устройству всё же доведётся поработать по прямому назначению.
Подготовлено по материалам НАСА.
Кроме «лунного грузчика», инженеры НАСА, как выясняется, разрабатывают лунного шахтёра и грунтовоза.
Проблема всё та же: низкая гравитация, означающая слабое сцепление с
грунтом. Regolith Advanced Surface Systems Operations Robot Excavator (RASSOR Excavator)
спроектирован в несколько в необычном ключе: для решения проблемы
трения он использует нечто больше похожее на дисковые пилы (или передний
каток MTT), чем на колёса. Крепятся они едиными блоками по три барабана
каждый к парам задних и передних конечностей, что позволяет при встрече
высоких препятствий поднять передний каток на их вершину, а затем, при
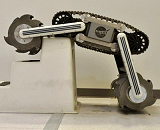
спуске, избежать переворачивания, удерживаясь за гребень задним катком.
| Чтобы перебираться через препятствия, робот может менять свою форму в довольно широких пределах. (Здесь и ниже фото NASA.) |
Функционировать RASSOR Excavator должен не сам по себе, а в паре с автономным роботизированным комплексом — оборудованием, перерабатывающим лунный грунт. Для взаимодействия с ним робот умеет трансформироваться в Z-образную форму, при которой его верхняя площадка, предназначенная для перевозки грунта, поднимается на 75 см над поверхностью земли (то есть Луны). Оттуда добытый реголит — по 18 кг за раз — сможет подобрать перерабатывающий агрегат. Несмотря на мнение ряда учёных о том, что смёрзшийся лунный грунт будет сложен для обработки и извлечения из него воды, в НАСА уверены, что в приполярных кратерах лёд существует в чистой форме и лишь слегка присыпан реголитом. Его нужно только раскопать и перевезти — собственно, для этого и создан телеуправляемый робот-копатель с широкими возможностями для автономных действий.
Особенно подчеркивается, что по проходимости небольшой робот весом всего в полцентнера близок к танку, за счёт барабанных катков (с развитыми грунтозацепами) на носу и корме. Благодаря повышенному сцеплению он сможет двигаться впятеро быстрее Curiosity, максимальная скорость которого не превышает 4 сантиметров в секунду.
Другой сильной стороной нового шасси называется его надёжность. К такой конструкции пришлось обратиться потому, что на испытаниях в пустынных условиях Калифорнии чисто гусеничные шасси показали слабость, неприметную на Земле: гусеничные звенья и элементы подвески засыпались пылью, блокировавшей со временем их дальнейшее вращение. На земных танках всё прекрасно чистится при помощи лома и танкового экипажа, да и столь тонкая пыль, как на Луне, у нас отчего-то не в ходу. Кроме того, грязь может быть смыта исключительно доступной водой, с которой на спутнике пока проблемы...
По расчётам, чтобы заправить одну ракету топливом, получаемым гидролизом из лунной воды (кислород и водород), одному RASSOR Excavator'у потребуется работать пять лет по 16 часов в сутки. Очевидно, что люди вряд смогут ходить за ним всё это время и счищать пыль с катков. Поэтому после испытаний от гусениц отказались, ну а колёса трудно рассматривать как опцию для мини-экскаватора при низкой гравитации.
Будем надеяться, что после доводки прототипа RASSOR Excavator 2, намеченного на 2014 год, устройству всё же доведётся поработать по прямому назначению.
Подготовлено по материалам НАСА.
Источник: http://science.compulenta.ru/
Комментарии 1

|
0 |
ТОП Новостей
| Инопланетные зонды скрываются в нашей Солнечной системе: исследование выявило скрытые техносигнатуры в поясе астероидов (0) |
| Найдено нечто странное за Нептуном: открытие ставит новые вопросы о внешних рубежах Солнечной системы (0) |
| Сны как отражение личности: новое исследование показало, что влияет на их содержание (0) |
| Мы запоминаем не мозгом, а желудком и кишечником: удивительные выводы нового исследования ученых (0) |
| Летающие объекты на старых картинах: шесть загадочных изображений из прошлого (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Онлайн всего: 80
Пользователей: 80
Новых: 0
Мы в соцсетях
