Вход / Регистрация
22.07.2026, 19:09
Выбор фона:



29.11.2017

Мягкие искусственные мышцы наделят роботов огромной силой
Искусственные мышцы из сокращающейся кожи на складном скелете сделают движения мягких роботов точными и невероятно сильными.
Гарвардские инженеры разработали мощные искусственные мускулы для «мягких» роботов: рука-манипулятор способна поднимать груз, превышающий ее собственный вес в 1000 раз. По словам Даниэлы Рус (Daniela Rus) и ее коллег, в производстве система будет обходиться дешевле доллара. Статью разработчиков публикует журнал Proceedings of the National Academy of Sciences (PNAS).
В самом деле, использование мягких робототехнических систем обещает сделать устройства более универсальными, биосовместимыми и эффективными при выполнении массы повседневных задач. Однако попытки сконструировать роботов из мягких полимеров наталкиваются на неизбежные последствия: они оказываются слишком «слабосильными», что снова ограничивает круг их потенциальных применений.
Настоящую «суперсилу» обещает дать мягким роботам новая система гарвардских инженеров. «Мы были очень удивлены, насколько мощными оказались приводы, – говорит профессор Дэниела Рус. – Мы, конечно, ожидали более высокой функциональности, чем обычно у мягких роботов. Но мы не ждали увеличения в тысячи раз. Это как дать им "суперсилу"». По словам ученой, на основе такой системы могут быть созданы роботы для множества разных применений.
Состоит она из внутреннего скелета, который может быть выполнен из металла или пластика. Скелет окружается герметичными полостями для движения газа или жидкости и, наконец, покрывается внешним слоем «кожи». Понижение давления за счет откачивания жидкости или газа заставляет ее «прилипать» к скелету и создает в нем напряжения, которые приводят к движению. Конструкция определяет, как и куда будет направляться движение, которое создает сокращение искусственной мышцы. Ученые показали, как, меняя ее, можно добиваться нужных движений.
Авторы сконструировали десятки таких устройств на основе различных материалов скелета и «кожи», приводимых в действие водой и воздухом. Один вариант обеспечивает высокий уровень сокращения от исходной длины; другой дал точность, которая позволяет поднять цветок, не сломав его; третий просто сворачивается спиралью.
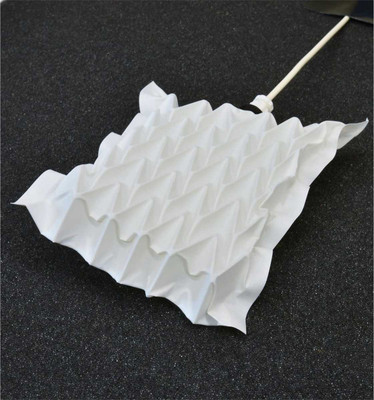
Геометрия скелетного каркаса заимствована из японской техники оригами / ©Shuguang Li, Wyss Institute at Harvard University
Как показали измерения, эти движения отличаются внушительной мощностью. По оценке ученых, система способна выдавать вшестеро больше силы на грамм собственного веса, чем весьма эффективные мускулы млекопитающих: 2,6 г искусственных мускул могут поднять объект весом до 3 кг. Более того, простое и не требующее специальных материалов, оно должно обходиться в производстве в считанные центы.
Гарвардские инженеры разработали мощные искусственные мускулы для «мягких» роботов: рука-манипулятор способна поднимать груз, превышающий ее собственный вес в 1000 раз. По словам Даниэлы Рус (Daniela Rus) и ее коллег, в производстве система будет обходиться дешевле доллара. Статью разработчиков публикует журнал Proceedings of the National Academy of Sciences (PNAS).
В самом деле, использование мягких робототехнических систем обещает сделать устройства более универсальными, биосовместимыми и эффективными при выполнении массы повседневных задач. Однако попытки сконструировать роботов из мягких полимеров наталкиваются на неизбежные последствия: они оказываются слишком «слабосильными», что снова ограничивает круг их потенциальных применений.
Настоящую «суперсилу» обещает дать мягким роботам новая система гарвардских инженеров. «Мы были очень удивлены, насколько мощными оказались приводы, – говорит профессор Дэниела Рус. – Мы, конечно, ожидали более высокой функциональности, чем обычно у мягких роботов. Но мы не ждали увеличения в тысячи раз. Это как дать им "суперсилу"». По словам ученой, на основе такой системы могут быть созданы роботы для множества разных применений.
Состоит она из внутреннего скелета, который может быть выполнен из металла или пластика. Скелет окружается герметичными полостями для движения газа или жидкости и, наконец, покрывается внешним слоем «кожи». Понижение давления за счет откачивания жидкости или газа заставляет ее «прилипать» к скелету и создает в нем напряжения, которые приводят к движению. Конструкция определяет, как и куда будет направляться движение, которое создает сокращение искусственной мышцы. Ученые показали, как, меняя ее, можно добиваться нужных движений.
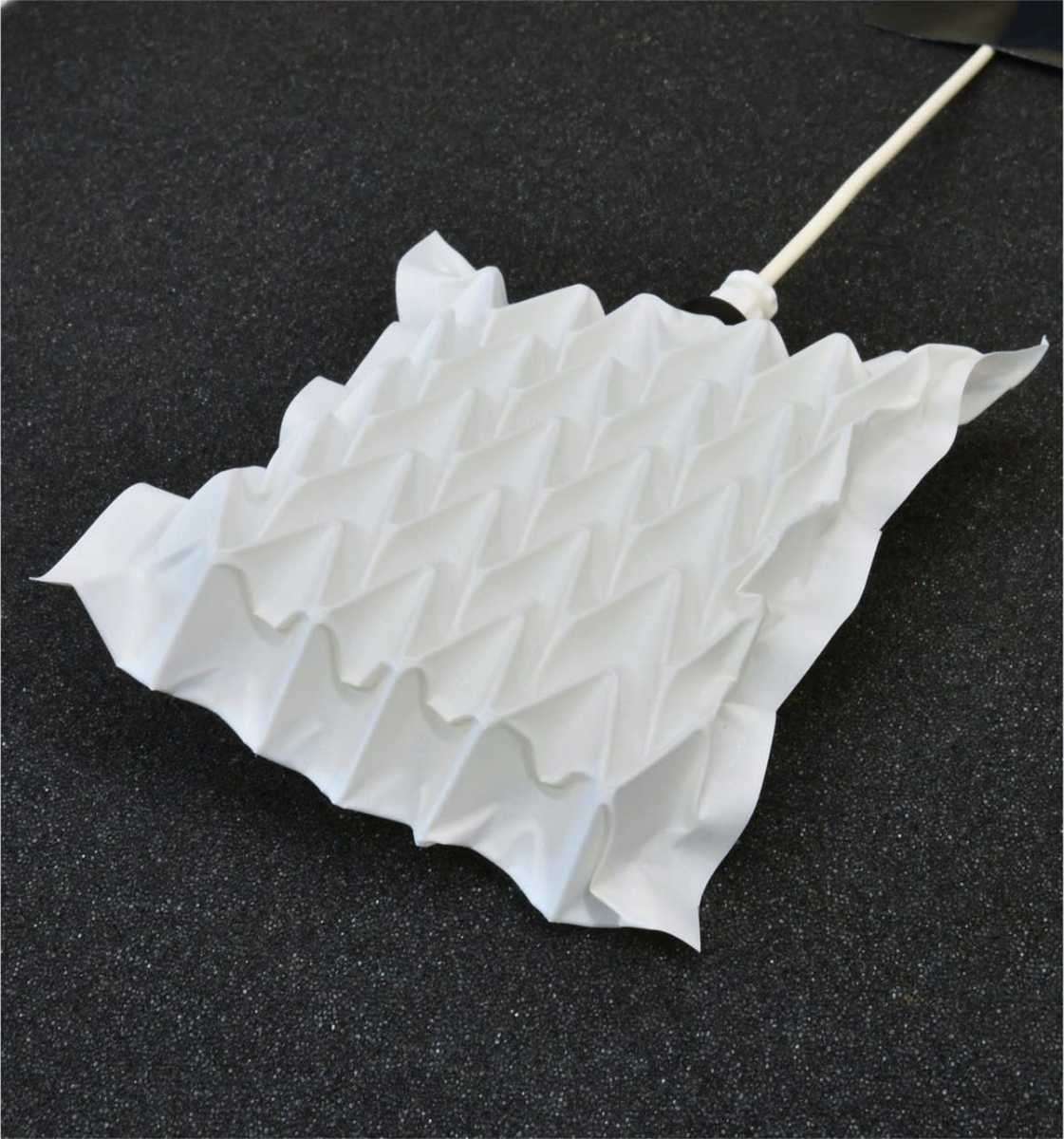
Геометрия скелетного каркаса заимствована из японской техники оригами / ©Shuguang Li, Wyss Institute at Harvard University
Как показали измерения, эти движения отличаются внушительной мощностью. По оценке ученых, система способна выдавать вшестеро больше силы на грамм собственного веса, чем весьма эффективные мускулы млекопитающих: 2,6 г искусственных мускул могут поднять объект весом до 3 кг. Более того, простое и не требующее специальных материалов, оно должно обходиться в производстве в считанные центы.
Комментарии 3

|
+2 |



ТОП Новостей
| Гуманоидный объект в рассекреченных файлах Пентагона привлек внимание китайского исследователя (0) |
| Концепция Роберта Монро о невидимых слоях сознания вокруг Земли (1) |
| "Потомки динозавров": Гарвардские исследователи предложили гипотезу о скрытой цивилизации на Земле как объяснении НЛО (1) |
| Магнитные полюса Земли в эдиакарский период находились у экватора — исследование меняет представления о древних континентах (0) |
| Ученые предложили модель пятого измерения через новую частицу-портал (0) |
Разговоры у камина

Новое на форуме
Последние комментарии
Архив записей
Статистика
Онлайн всего: 100
Пользователей: 100
Новых: 0
Мы в соцсетях
